Лазерный гравер из dvd своими руками





















- Просмотрено 49958
- Скачано 3879
- Толщина слоя (разрешение) 0.20 мм
- Наличие поддержек Нет
- Заполнение 25 %
- Толщина вертикальной стенки (периметр) 0 мм
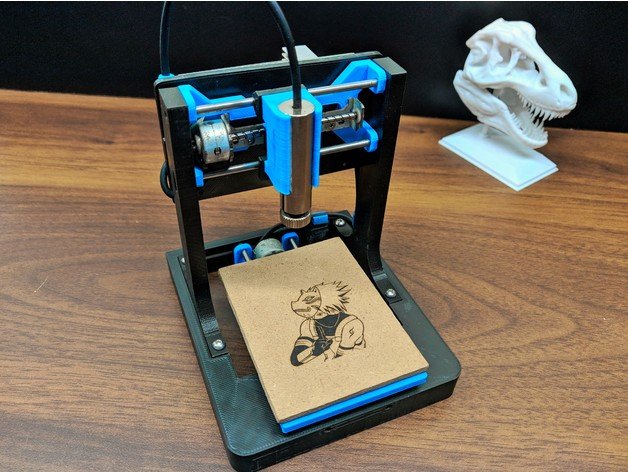
Это версия лазерного гравера и резака для бумаги с ЧПУ, на основе Arduino, используя старый dvd-привод и лазер мощностью 250 мВт
Необходимые детали и материалы:
- Arduino Nano (с USB-кабелем)
- 2x DVD приводной шаговый механизм
- 2 модуля драйвера шагового двигателя A4988 (или экран GRBL)
- Лазер 250 мВт с регулируемой линзой (или выше)
- 12В 2Amp минимум питания
- 1x IRFZ44N N-CHANNEL Mosfet
- 1х 10к резистор
- Резистор 1x 47 Ом
- 1x регулятор напряжения LM7805 (с радиатором)
- Пустая печатная плата
- Головки Male и Female
- 2,5 мм JST XH-Style
- 2-контактный разъем
- 1x 1000 мкФ 16 В конденсатор Перемычка кабелей
- 8x маленьких неодимовых магнитов (которые я спас от механизма линз DVD)
- 1x 2-контактный штекер в винтовом разъеме клеммной колодки
- Лента транспортная (100 мм)
- Супер клей
- 6x винтов M3x12
- 8x M2x5 винтов
- Лазерные защитные очки.


Потребуются два механизма привода DVD, один для оси X и второй для оси Y.
Используя небольшую отвертку с головкой Phillips, удалили все винты и отсоединенный шаговый двигатель, скользящие направляющие и толкатель.
Шаговые двигатели представляют собой 4-контактный двухполюсный шаговый двигатель.
Небольшой размер и низкая стоимость DVD-мотора говорит о том, что вам не стоит ожидать высокого разрешение мотора. Это обеспечивается ведущим винтом. Кроме того, не все такие двигатели делают 20 шагов / 24 об., также является общей спецификацией. Вам просто нужно протестировать ваш двигатель, чтобы убедиться, на что он способен.
Порядок расчета разрешающей способности шагового двигателя dvd привода
Чтобы измерить разрешение шагового двигателя привода CD / DVD, нужен цифровой микрометр. Расстояние вдоль винта было уже измерено. Общая длина винта промерена с помощью микрометра, которая оказалась 51,56 мм. Далее нужно определить значение отведения, которое представляет собой расстояние между двумя соседними резьбами на винте. Потоки были рассчитаны на 12 нитей в пределах этого расстояния. Отвод = расстояние между соседними нитями = (общая длина / количество нитей = 51,56 мм) / 12 = 4,29 мм / об. Угол шага составляет 18 градусов, что соответствует 20 шагам / оборот. Теперь, когда вся необходимая информация доступна, разрешение шагового двигателя можно рассчитать, как показано выше: Разрешение = (Расстояние между смежными нитями) / (N шагов / оборот) = (4,29 мм / оборот) / (20 шагов / оборот) = 0,214 мм / шаг. Что в 3 раза лучше требуемого разрешения, которое составляет 0,68 мм / шаг.
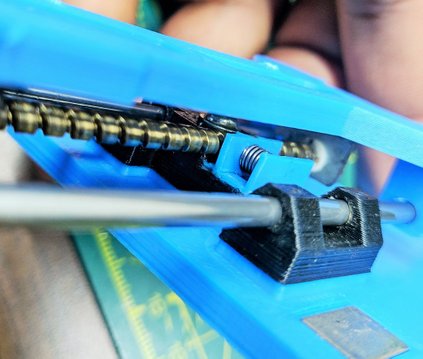
Подготовка слайдера
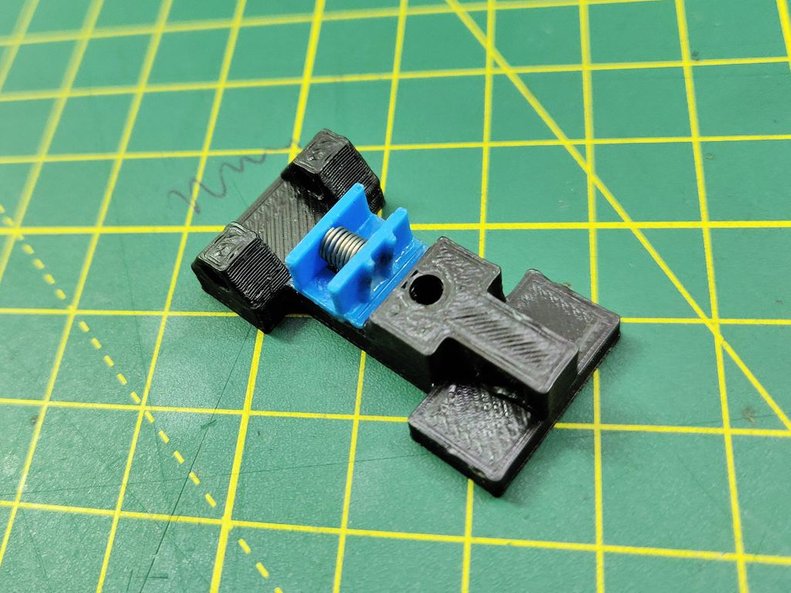
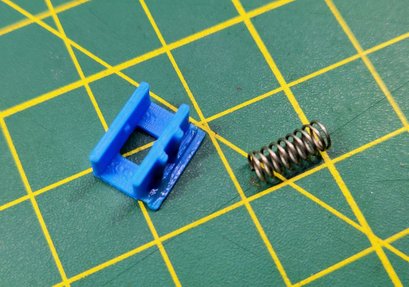

Используя супер клей, крепим ползунок и направляющую. Пружина прикреплена для поддержания натяжения между направляющей и ходовым винтом, чтобы избежать зазубрин.
Сборка направляющих для оси Y

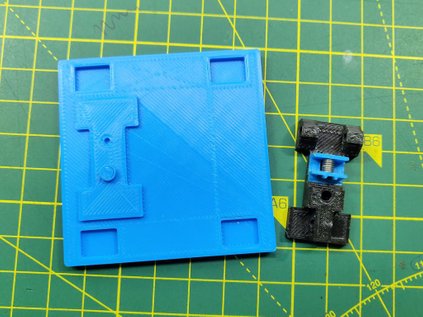
Перед установкой ползунка в основание, приклеим 4 маленьких неодимовых магнитов (из механизма линз DVD) на X-пластину. Эти магниты помогут удерживать заготовку в рабочей зоне.
Гладкий стержень сохранит механизм скольжения в целости и сохранности относительно основания.
Сборка направляющих для оси X
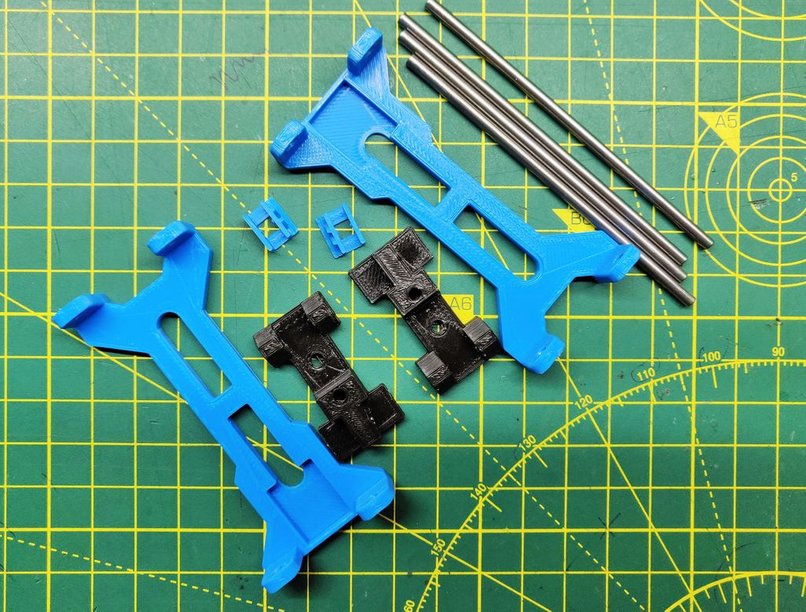

Используя супер клей и винт, прикрепим направляющий механизм к корпусу лазера.
Затем прикрепите шаговый двигатель к месту, используя винты и вставьте гладкие стержни и направляющую часть в отверстия, учитывая, что ползунок движется свободно и не слишком сильно. Далее прикрепим к нему боковые стойки рамы.
Подключение шаговых двигателей


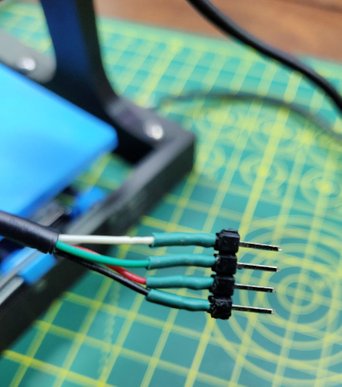
Для шаговых двигателей используем старый USB-кабель, потому что он имеет 4 провода внутри и крышку, так же он более гибкий и с ним легко работать.
Используя режим непрерывности в мультиметре, определите 2 катушки, катушку A и катушку B.
Я сделал 2 пары проволоки, выбрав цвета: одну пару для катушки A и вторую для катушки B.
Припаял их и использовал термоусадочную трубку.
Комбинирование осей X и Y
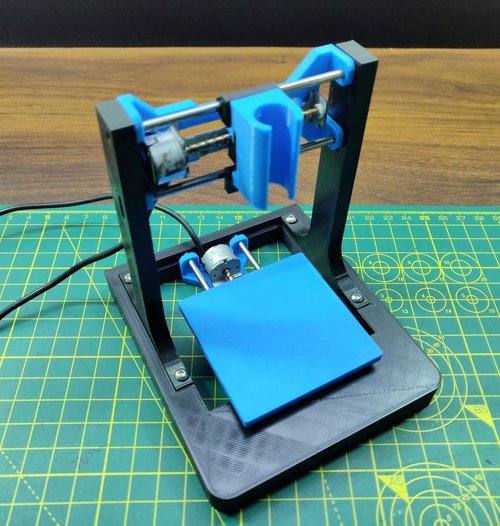
Используя 4 винта M3x12, объедините основание и две боковые рамы в одну сборку.
Электроника
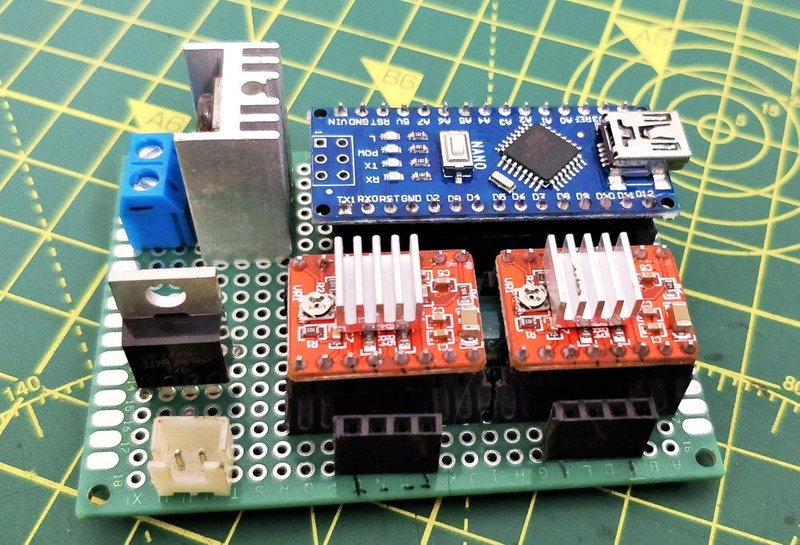
Детали используемые для драйвера:
- Arduino nano.
- 2x A4988 Драйверы шаговых двигателей.
- 1x IRFZ44N N-КАНАЛЬНЫЙ МОП-транзистор.
- 1x LM7805 Регулятор напряжения с радиатором.
- 1x 47 Ом и 1x 10 кОм резистор.
- 1x 1000 мкФ 16 В конденсатор.
- 1x 2,5 мм JST XH-Style 2-контактный разъем.
- Штыри заголовка мужского и женского пола.
- 1x (20 мм х 80 мм пустой печатной платы).
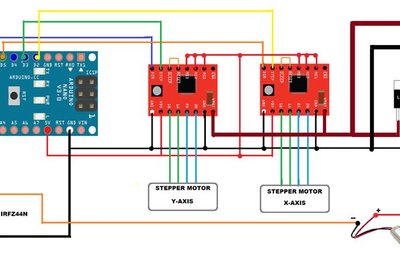
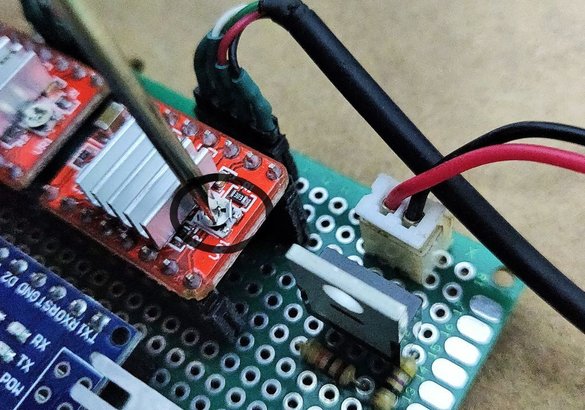
В GRBL защищены цифровые и аналоговые пины Arduino.
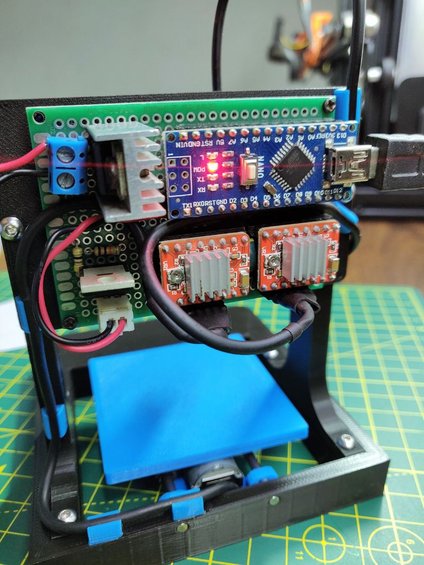
Шаговый контакт для осей X и Y прикреплен к цифровым контактам 2 и 3 соответственно. Вывод «Dir» для осей X и Y прикреплен к цифровым выводам 5 и 6 соответственно. D11 для лазерного включения. Arduino получает питание через USB-кабель. Драйверы A4988 через внешний источник питания. Все основание имеет общие связи. VDD A4988 подключены к 5V Arduino. Лазер, который использовался, работает на 5 В и имеет встроенную цепь постоянного тока. Для источника постоянного напряжения 5 В от внешнего источника питания используется регулятор напряжения LM7805. Радиатор является обязательным. IRFZ44N N-КАНАЛЬНЫЙ МОП-транзистор работает как электронный переключатель, когда получает цифровой высокий сигнал с контакта D11 Arduino. ПРИМЕЧАНИЕ: используем 5 В от Arduino Nano
Настройка микро шага для каждой оси.
MS0 MS1 MS2 Разрешение микрошагов.
Низкий Низкий Низкий Полный шаг.
Высокий Низкий Низкий Полшага
Низкий Высокий Низкий Квартальный шаг.
Высокий Высокий Низкий Восьмой шаг.
Высокий Высокий Высокий Шестнадцатый шаг.
3 контакта (MS1, MS2 и MS3) предназначены для выбора одного из пяти шагов решения в соответствии с приведенной выше таблицей правды. Эти контакты имеют внутренние понижающие резисторы, поэтому, если мы оставим их отключенными, плата будет работать в режиме полного шага. Мы использовали 16-ю ступенчатую конфигурацию для плавного и бесшумного. Большинство (но, конечно, не все) шаговых двигателей совершают 200 полных шагов за оборот. Путем надлежащего управления током в катушках можно заставить двигатель двигаться меньшими шагами. Pololu A4988 может заставить двигатель двигаться с шагом 1/16 — или 3200 шагов за оборот. Основное преимущество микрошагования заключается в уменьшении шероховатости движения. Единственные полностью точные позиции — позиции полного шага. Двигатель не сможет удерживать стационарное положение в одном из промежуточных положений с той же точностью положения или с тем же удерживающим моментом, что и в положениях полного шага.
Сборка электроники в кадр
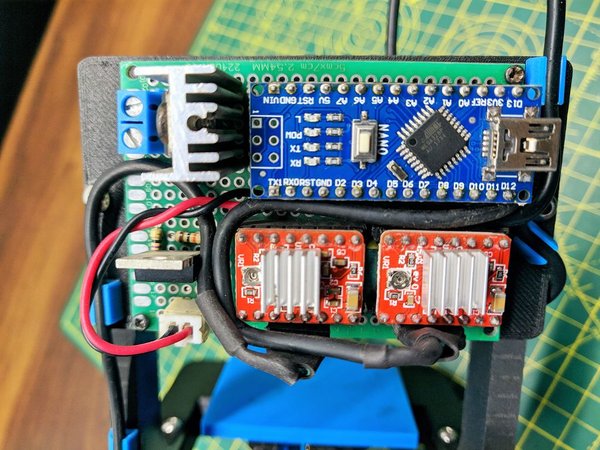

Смонтируйте плату драйвера на задней панели, используя 2 винта M2 и к раме машины, используя 2 винта M3x12. Подключены к соединениям для шаговых двигателей X, Y и Laser.
Регулировка тока шагового драйвера
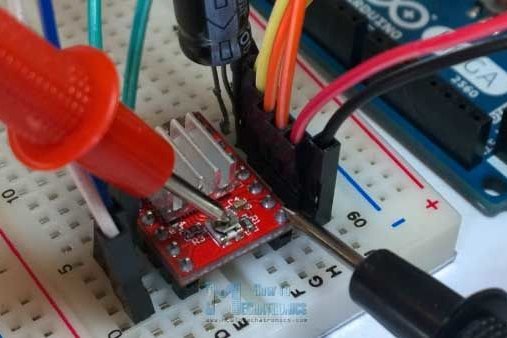
Для достижения высоких скоростей шага, питание двигателя обычно намного выше, чем было бы допустимо без активного ограничения тока. Например, типичный шаговый двигатель может иметь максимальный номинальный ток 1 А с сопротивлением катушки 5 Ом, что будет указывать на максимальное питание двигателя 5 В. Использование такого двигателя с напряжением 12 В позволило бы повысить скорость шага, но ток должен активно быть ограниченным до 1А, чтобы предотвратить повреждение двигателя. A4988 поддерживает такое активное ограничение тока, а потенциометр триммера на плате можно использовать для установки ограничения тока. Один из способов установить ограничение тока — перевести драйвер в полноступенчатый режим и измерить ток, проходящий через одну катушку двигателя, без замыкания входа STEP. Измеренный ток будет 0.7-кратный предел тока (поскольку обе катушки всегда включены и ограничены до 70% от предела тока, установленного в режиме полного шага). Обратите внимание, что изменение логического напряжения Vdd на другое значение изменит настройку ограничения тока, поскольку напряжение на выводе «ref» является функцией Vdd. Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока относится к опорному напряжению следующим образом: Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока соотносится к опорному напряжению следующим образом: Другой способ установить предел тока — это измерить напряжение непосредственно на потенциометре и рассчитать результирующий предел тока (резисторы чувствительности тока равны 0,1 Ом). Ограничение тока соотносится к опорному напряжению следующим образом: Ограничение тока = VREF × 1,25. Так, например, если опорное напряжение 0,6 В, то предельный ток 0.75A. Как упомянуто выше, в режиме полного шага ток через катушки ограничен до 70% от предела тока, поэтому, чтобы получить ток катушки для полного шага в 1А, предел тока должен быть 1А / 0,7 = 1,4А, что соответствует до VREF 1,4A / 1,25 = 1,12 В. См. таблицу данных A4988 для получения дополнительной информации. Примечание. Ток катушки может сильно отличаться от тока источника питания, поэтому не следует использовать ток, измеренный на источнике питания, для установки предела тока. Подходящее место для установки вашего измерителя тока — последовательно с одной из ваших катушек шагового двигателя.
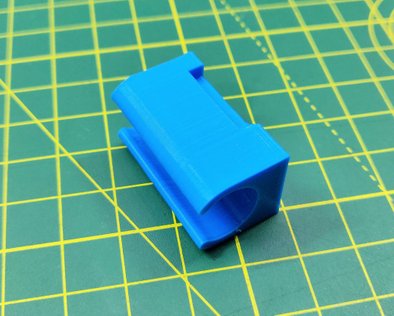
Cборка лазера

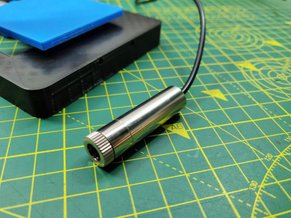
Лазер, который я использовал, это фокусируемый лазерный модуль 200-250 мВт, 650 нм. Наружный металлический корпус работает как теплоотвод для лазерного диода. Имеет фокусирующую линзу для регулировки лазерной точки.
Подсоедините разъем лазерного провода к лазерному разъему на плате драйвера.
Купить лазер можно тут.
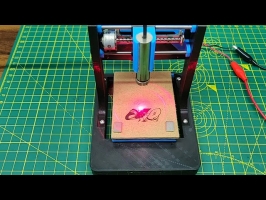
Готовимся!
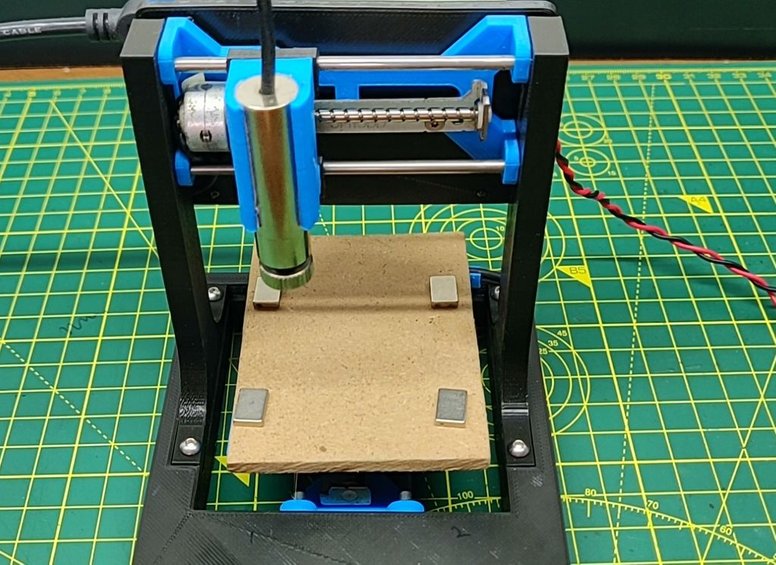
Используя четыре небольших неодимовых магнита, зафиксируйте рабочую деталь на рабочей станине и установите оси X и Y в исходное положение (home). Включите плату драйвера через внешний источник питания и подключите Arduino Nano к компьютеру через кабель USB A — USB Mini B.
Также питание платы осуществляется от внешнего источника питания.
БЕЗОПАСНОСТЬ ПРЕЖДЕ ВСЕГО!!!!!!!!
ОБЯЗАТЕЛЬНО ИСПОЛЬЗУЙТЕ СПЕЦИАЛЬНЫЕ ОЧКИ ДЛЯ ЗАЩИТЫ ОТ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ!!!!!!!!
Прошивка GRBL
- Скачать GRBL, https://github.com/gnea/grbl
- Распакуйте на рабочий стол папку grbl-master, вы найдете ее в файле master.zip
- Запустите Arduino IDE
- В меню панели приложения выберите: Sketch -> #include Library -> Add Library from file.ZIP
- Выберите папку grbl, которую вы можете найти внутри папки grlb-master, и нажмите Open
- Теперь библиотека установлена и программное обеспечение IDE покажет вам следующее сообщение: Библиотека добавлена в вашу библиотеку. Проверьте меню «Включение библиотек».
- Затем откройте пример под названием «grbl upload» и загрузите его на свою платформу arduino.
Программное обеспечение для отправки G-кода
Также нам нужно программное обеспечение для отправки G-кода в ЧПУ, для этого я использовал LASER GRBL
LaserGRBL — один из лучших стримеров для Windows GCode для лазерных граверов DIY. LaserGRBL может загружать и транслировать путь GCode в arduino, а также гравировать изображения, картинки и логотип с помощью встроенного инструмента конвертации.
LASER GRBL Скачать на http://lasergrbl.com/en/
Последняя версия, стабильная
https://github.com/arkypita/LaserGRBL/releases/tag/v3.0.10
Полная версия
github.com/arkypita/LaserGRBL
LaserGRBL постоянно проверяет наличие COM-портов на машине. Список портов позволяет вам выбрать COM-порт, к которому подключена ваша плата управления.
Пожалуйста, выберите правильную скорость передачи данных для соединения в соответствии с конфигурацией прошивки вашего устройства (по умолчанию 115200).
Настройки Grbl:
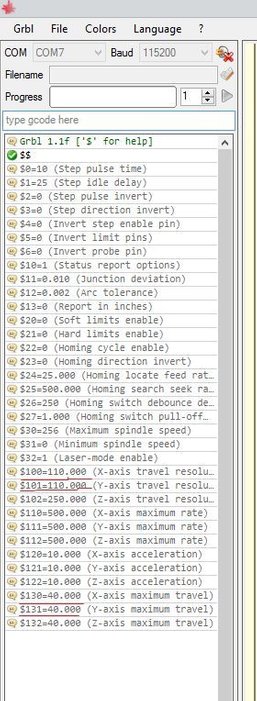
$$ — Просмотр настроек Grbl
Чтобы просмотреть настройки, введите $$ и нажмите клавишу ввода после подключения к Grbl. Grbl должен ответить списком текущих настроек системы, как показано в примере ниже. Все эти настройки являются постоянными и хранятся в EEPROM, поэтому, если вы выключите питание, они будут загружены обратно при следующем включении Arduino.
$0=10 (step pulse, usec)
$1=25 (step idle delay, msec)
$2=0 (step port invert mask:00000000)
$3=6 (dir port invert mask:00000110)
$4=0 (step enable invert, bool)
$5=0 (limit pins invert, bool)
$6=0 (probe pin invert, bool)
$10=3 (status report mask:00000011)
$11=0.020 (junction deviation, mm)
$12=0.002 (arc tolerance, mm)
$13=0 (report inches, bool)
$20=0 (soft limits, bool)
$21=0 (hard limits, bool)
$22=0 (homing cycle, bool)
$23=1 (homing dir invert mask:00000001)
$24=50.000 (homing feed, mm/min)
$25=635.000 (homing seek, mm/min)
$26=250 (homing debounce, msec)
$27=1.000 (homing pull-off, mm)
$100=314.961 (x, step/mm)
$101=314.961 (y, step/mm)
$102=314.961 (z, step/mm)
$110=635.000 (x max rate, mm/min)
$111=635.000 (y max rate, mm/min)
$112=635.000 (z max rate, mm/min)
$120=50.000 (x accel, mm/sec^2)
121=50.000 (y accel, mm/sec^2)
$122=50.000 (z accel, mm/sec^2)
$130=225.000 (x max travel, mm)
$131=125.000 (y max travel, mm)
$132=170.000 (z max travel, mm)
Настройка системы
Вот самая трудная часть проекта
— Настройка лазерного луча в наименьшую возможную точку на заготовке. Это самая сложная часть, которая требует времени и терпения, используя метод следа и ошибки.
— Настройка GRBL на $ 100, $ 101, $ 130 и $ 131
Настройка для GRBL
$ 100 = 110.000
$ 101 = 110,000
$ 130 = 40,000
$ 131 = 40.000
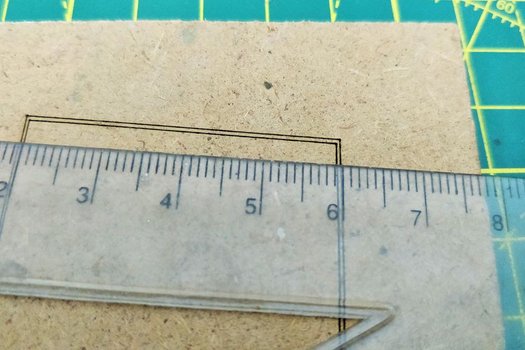
Я попытался гравировать квадрат сторон 40 мм и после стольких ошибок и изменения настройки grbl, я получил правильную линию 40 мм, выгравированную как по оси X, так и по оси Y. Если разрешение по осям X и Y не совпадает, изображение будет масштабироваться в любом направлении.
Имейте в виду, что не все шаговые двигатели от DVD приводов одинаковы.
Это длительный и трудоемкий процесс, но результаты будут хороши, если серьезно подойти к настройке.
Пользовательский интерфейс LaserGRBL.
- Управление подключением: здесь вы можете выбрать последовательный порт и правильную скорость передачи данных для подключения в соответствии с конфигурацией прошивки grbl.
- Управление файлами: это показывает загруженное имя файла и процесс гравировки. Зеленая кнопка «Play» начнет выполнение программы.
- Ручные команды: здесь вы можете ввести любую строку G-кода и нажать «ввод». Команды будут помещены в очередь команд.
- Журнал команд и коды возврата команд: показать команды в очереди, их состояние выполнения и ошибки.
- Jogging control: позволяет вручную позиционировать лазер. Левый вертикальный ползунок контролирует скорость движения, правый ползунок контролирует размер шага.
- Предварительный просмотр гравировки: эта область показывает окончательный предварительный просмотр работы. Во время гравировки маленький синий крестик покажет текущее положение лазера во время выполнения.
- Сброс / возвращение / разблокировка GRBL: эти кнопки подают команду мягкого сброса, возврата и разблокировки на доску GRBL. Справа от кнопки разблокировки вы можете добавить некоторые пользовательские кнопки.
- Удержание и возобновление подачи: эти кнопки могут приостанавливать и возобновлять выполнение программы, посылая команды удержания или возобновления подачи на доску grbl.
- Количество строк и проекция времени: LaserGRBL может оценивать время выполнения программы на основе фактической скорости и хода выполнения задания.
- Переопределяет состояние элемента управления: показывает и изменяет фактическую скорость и переопределение мощности. Переопределение — это новая функция grbl v1.1, которая не поддерживается в более старой версии.
Гравюра на дереве


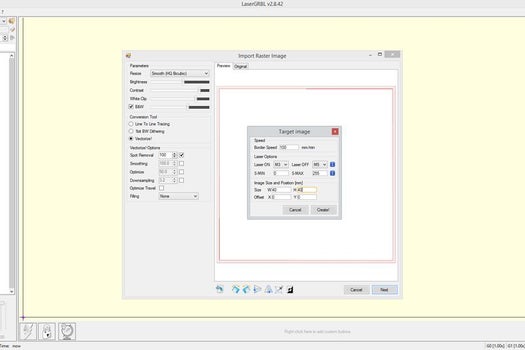
Растровый импорт позволяет загружать изображения любого вида в LaserGRBL и поворачивать его GCode инструкциями без необходимости использования другого программного обеспечения. LaserGRBL поддерживает фотографии, картинки, карандашные рисунки, логотипы, значки и старается сделать все возможное с любым видом изображения.
Его можно вызвать из меню «Файл, Открыть файл», выбрав изображение типа jpg, png или bmp.
Настройки для гравировки различны для всех материалов.
Определите скорость гравировки на мм, а качество линий на мм.
Этот лазер мощностью 250 мВт также способен резать тонкую бумагу, но скорость должна быть очень низкой, т.е. не более 15 мм / мин и лазерный луч должен быть правильно отрегулирован.
Оригинал: https://www.thingiverse.com/thing:3521286